
티스토리 뷰
RTK-GPS의 측정방법은
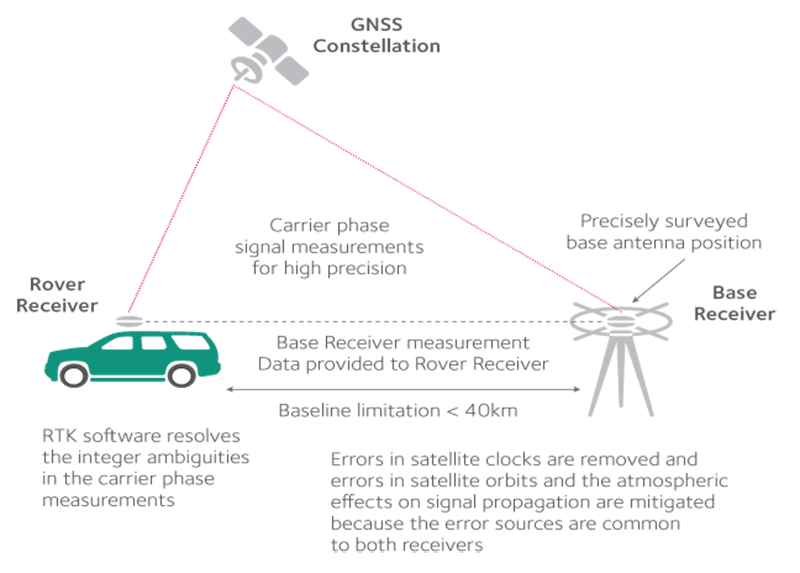
1) Base는 정확한 위치를 가지고 있는다고 가정합니다.
2) Rover와 Base는 GPS데이터를 받고 Base는 자신의 위치와 GPS데이터간의 오차를 계산해 냅니다.
3) 계산해 낸 오차를 Base는 Rover에게 전송하여 GPS데이터를 수정하도록 합니다.
4) 이러한 과정의 반복으로 Rover는 정확한 위치를 찾을수 있게 됩니다.
GNSS : Global Navigation Staellite System 위성항법시스템
미국의 GNSS 시스템이 GPS//
-> 보정없는 GNSS 신호면 평균 5~10m의 오차가 발생합니다.
정확도는 BASE설치하여 GPS를 보정하는 시간과 로버와의 거리에 따라 달라지며
수일동안 보정하면 보통 1~2cm내외 입니다.
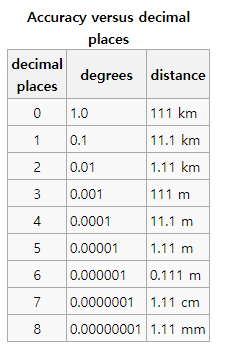
일반적으로 GPS의 정확도는 10진수법으로 나타낼 경우
소수점 5자리의 일때 1.1m내외, 6자리의 경우 11cm , 7자리의 경우 약 1.1cm내외입니다.
MP에서 RTK를 사용할 경우 GPS의 데이터 전송 과정은
BASE : 바로 RTK-GPS데이터 값을 보여주고
ROVER : GPS모듈에서 받은 신호값 -> Pixhawk내부에서 EKF보정 처리 -> MAVLink를 통해 BASE로 전달 됩니다
이때 Pixhawk내부 펌웨어와 MAVLink모두 데이터 처리형이 float형입니다.
따라서 밑의 소수부분은 자른 후 소수 7번째자리 까지 데이터만 전송하고 신뢰구간은 소수 6번째 자리까지 입니다.
그리고 아두파일럿 RTK 문서를 보니 상대 위치 절대 위치의 표현이 있어 조금 헷갈렸습니다.
여기서
상대위치 = MP나 Qgroundcontrol에 나타나는 로버의 GPS좌표
절대위치 = 실제 진짜 로버의 위치로 해석하여 이해하였습니다.
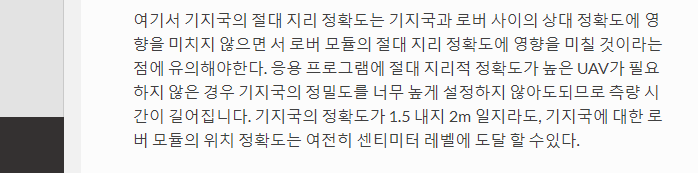
이렇게 해석하여 RTK문서부분을 보면 BASE의 오차가 만약 6cm정도이면
로버의 오차또한 6cm정도로 보아도 문제없다는 것을 알 수 있습니다./
RTK Float 와 RTK Fixed가 있는데
RTK Fixed가 더 정확합니다.
'공부공부' 카테고리의 다른 글
| VLC 영상 스트리밍 (0) | 2020.06.08 |
|---|---|
| 선형 칼만필터 (0) | 2020.05.09 |
| Visual Studio) netsdk1 에러 발생시 (0) | 2020.05.06 |
| Mission Planner Tuning (0) | 2020.03.23 |
| Pixhawk와 미션플래너를 활용하여 WayPoint 사용하기 (1) | 2020.02.07 |